Measure range : Roll ±180°, Pitch ±85°, Azimuth 0-360°
Azimuth accuracy : 1°
Output interface : RS232 , RS485, TTL
Inclination accuracy : 0.2°(Static) , 0.5 °( Dynamic )
Power supply : DC5V ( Default ) , DC9-36V optional
Dimension : L55 x W37 x H24mm
Weight : ≤135g ( including 1m cable )

 Product Description
Product Description
 Scope of application
Scope of application
 Parameter
Parameter
 Dimensions
Dimensions
 Download
Download
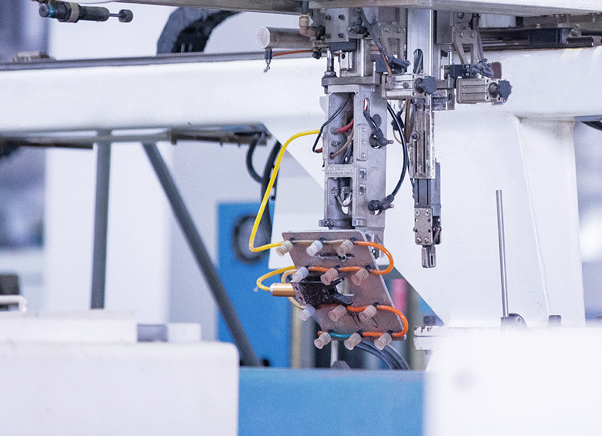
DDM365B is a three-dimensional dynamic electronic compass that integrates a 12 axis inertial measurement unit, including three-axis attitude angle, three-axis accelerometer, three-axis gyroscope, and three-axis magnetic induction technology. By utilizing the high dynamic angle characteristics of gyroscopes and the high stability attitude characteristics of accelerometer, the pitch and roll angles that follow complex attitude changes are obtained through dynamic inertial navigation algorithms. The geomagnetic azimuth angle adopts hard and soft magnetic calibration algorithms, which enable the compass to eliminate the influence of magnetic fields through calibration algorithms even in environments with magnetic field interference. By real-time calculation of heading through the central processing unit and dynamic heading compensation of magnetic azimuth over a large range using dynamic pitch and roll angles, the compass can provide high-precision heading data even at a tilt angle of up to ± 85 °. The electronic compass integrates a highly DSP processing unit with diverse output methods, including standard interfaces such as RS232/RS485/TTL, and can also accept customization of other communication interfaces.
DDM365B is small in size, low in power consumption, and can be used in many highly seismic and extremely harsh environments such as offshore ships, antenna search, etc. It is more suitable for various high-precision measurement integrated control systems today.
Engineering vehicle leveling








| DDM365B |
| Parameter |
| Compass heading | Heading accuracy | 1° |
| Resolution | 0.1° | |
| Pitch range | ±90° | |
| Roll range | ±180° | |
| Inclination accuracy | Static state 0.2° | |
| Dynamic 0.5° | ||
| Resolution | 0.1° | |
| Tilt compensation angle range | Roll ±180° | |
| Pitch<85° | ||
| Three-axis magnetic field | measuring range | ±800uT |
| Calibration | Hard iron calibration | yes |
| Soft iron calibration | yes | |
| Magnetic field interference calibration method | One rotation of the plane (two-dimensional calibration) | |
| Interface | Startup delay | <50ms |
| Output rate | 5~100Hz(settable) | |
| Baud rate | 4800到115200baud | |
| Output format | Binary high performance protocol | |
| Power | Supply voltage | (Default) DC +5V |
| (Customized) DC 9~36V | ||
| Current (MAX) | 45mA | |
| Ideal model | 35mA | |
| Sleep mode | TBD | |
| Environment | Operating range | -40℃~+85℃ |
| Storage temperature | -40℃~+85℃ | |
| Vibration resistance | 2500g | |
| EMC | According to EN61000 and GBT17626 | |
| MTBF | ≥98000 hours/time | |
| Insulation resistance | ≥100 megohm | |
| Impact resistance | 100g@11ms、3 Axial Direction (Half Sinusoid) | |
| Anti-vibration | 10grms、10~1000Hz | |
| Size | L55*W37*H24mm | |
| Weight | ≤135g (including 1 meter cable) | |
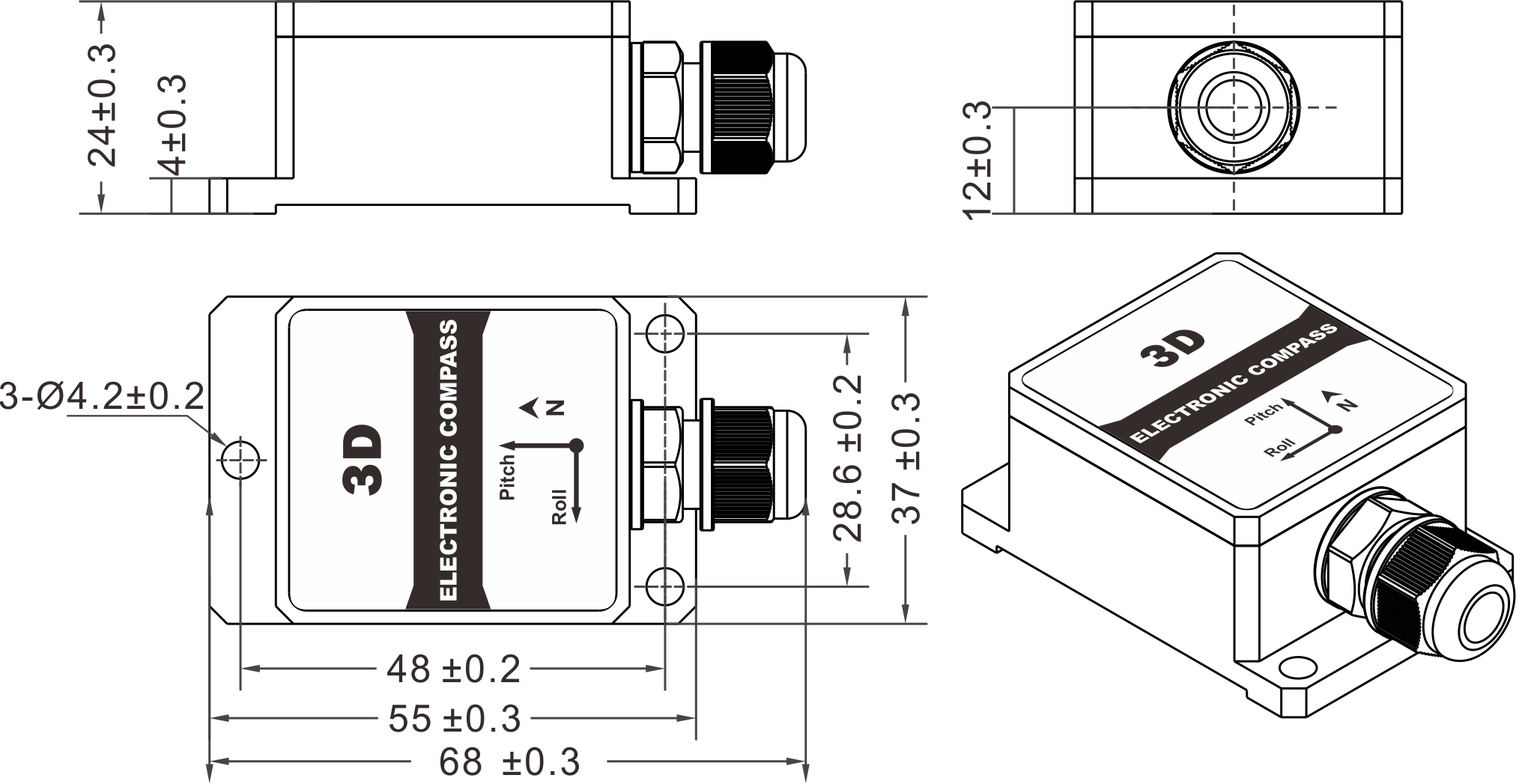
L68×W37×H24mm
L48×28.6×4mm
3 M4 screws
* Please contact the online sales engineer to obtain the product specification of Rion, or email sales@rion-tech.net to obtain it.



Copyright © RION TECHNOLOGY